See YouTube channels for details: http://www.youtube.com/c/CharlieMorrisZL2CTM
Test code for the LCD and Si5351


*****************************************************************
Audio Amplifier


















#include <LiquidCrystal_I2C.h>
#include <si5351.h>
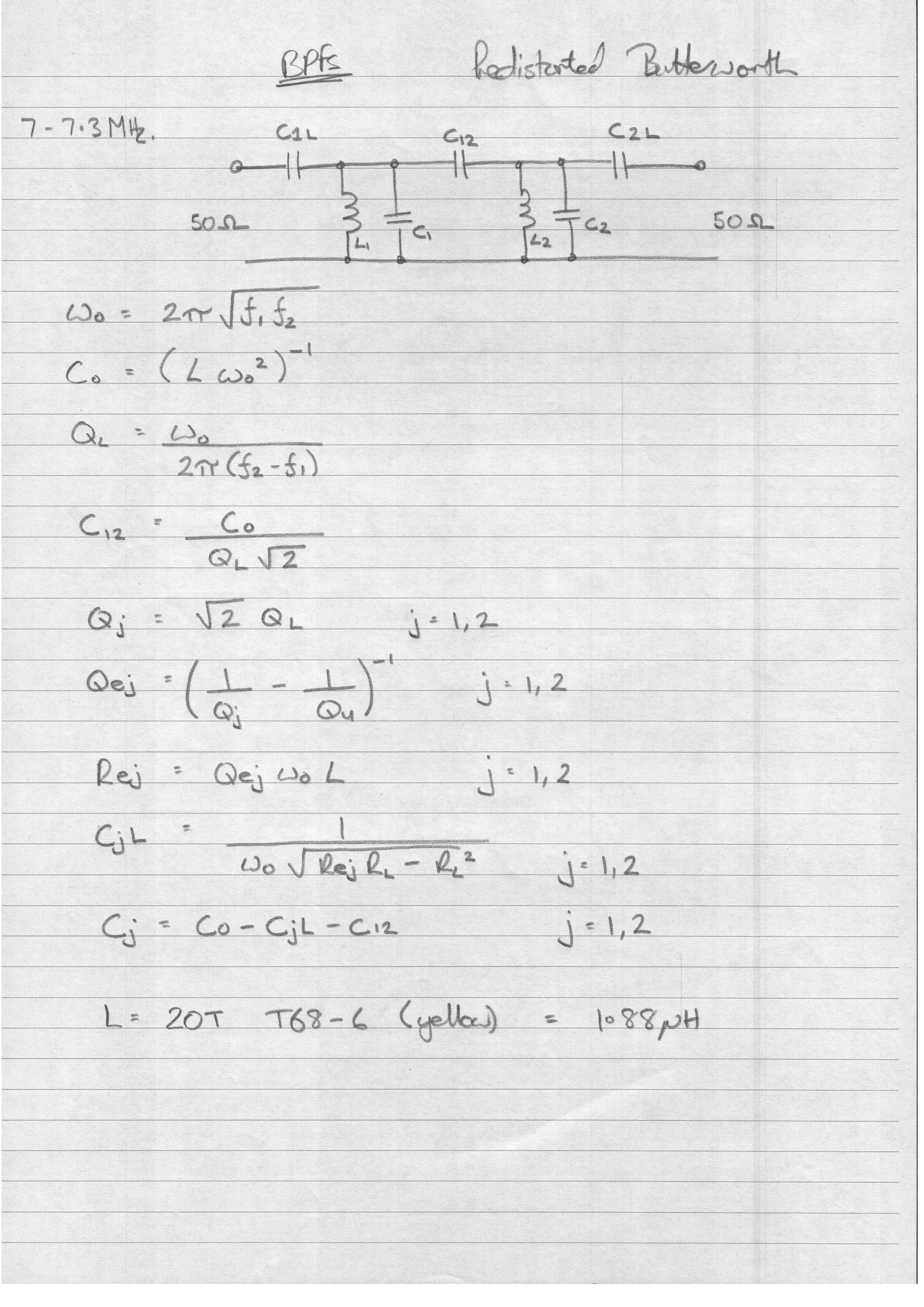
static const long bandStart = 7000000; // start of VFO range
static const long bandEnd = 7300000; // end of VFO range
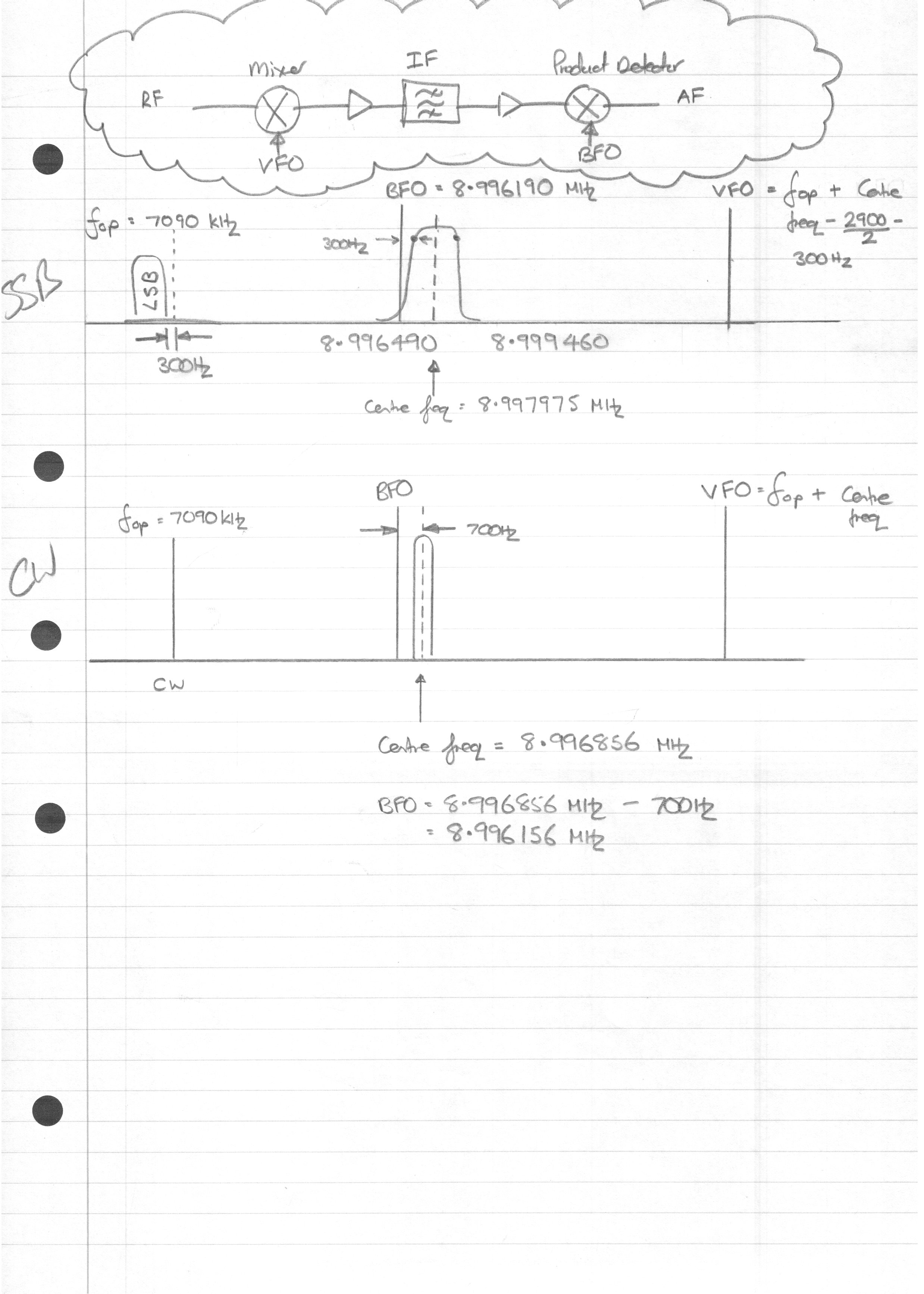
static const long bandInit = 7090000; // where to initially set the frequency
volatile long freq = 7090000; // the current freq
volatile long oldfreq = 0; // the previous freq
volatile long BFO_freq = 0; // Low side injection thus no SB inversion. (was 8997200)
volatile long radix = 1000; // How much to change the frequency by, clicking the Up Down switches
volatile long oldradix = 0; // the previous radix
volatile float SWR = 2.6; // SWR
volatile float oldSWR = 2.6; // the previoud SWR
volatile float FWD = 5.1; // Forward power
volatile float REV = 1.1; // Reflected power
volatile int TX = 0; // 0=RX, 1=TX
volatile int oldTX = 1; // the old TX
volatile int tune = 0; // 0=No tune, 1=tune
volatile int oldtune = 1; // the old tune
unsigned int encoderA, encoderB, encoderC = 1; // rotary encoder variables
// Rotary encoder pins and other inputs
static const int rotAPin = 2;
static const int rotBPin = 3;
static const int RadixPin = 4;
static const int PTTPin = 5;
static const int TunePin = 6;
byte OneBar[8] = { // Array of bytes
B10000,
B10000,
B10000,
B10000,
B10000,
B10000,
B10000,
B10000
};
byte TwoBar[8] = { // Array of bytes
B10100,
B10100,
B10100,
B10100,
B10100,
B10100,
B10100,
B10100
};
byte ThreeBar[8] = { // Array of bytes
B10101,
B10101,
B10101,
B10101,
B10101,
B10101,
B10101,
B10101
};
// Instantiate the Objects
LiquidCrystal_I2C lcd(0x27, 16, 2); // 0x27 is the address of the test LCD (3F for the main LCD)
Si5351 si5351;
void setup() {
// Set up I/O pins
pinMode(rotAPin, INPUT);
digitalWrite(rotAPin, HIGH); // internal no pull-up enabled
pinMode(rotBPin, INPUT);
digitalWrite(rotBPin, HIGH); // internal no pull-up enabled
pinMode(RadixPin, INPUT);
digitalWrite(RadixPin, HIGH); // internal no pull-up enabled
pinMode(PTTPin, INPUT);
digitalWrite(PTTPin, HIGH); // internal no pull-up disabled
pinMode(TunePin, INPUT);
digitalWrite(TunePin, HIGH); // internal no pull-up enabled
// Initialize the display
lcd.begin();
lcd.backlight();
lcd.noCursor();
// Initialize the DDS
si5351.init(SI5351_CRYSTAL_LOAD_8PF, 0, 25740); // 62100 is the specific calibration factor for this Si5351 board
si5351.drive_strength(SI5351_CLK0, SI5351_DRIVE_8MA);
si5351.drive_strength(SI5351_CLK2, SI5351_DRIVE_8MA);
lcd.createChar(1, OneBar); // Create a custom character
lcd.createChar(2, TwoBar);
lcd.createChar(3, ThreeBar);
}
void loop() {
CheckEncoder();
CheckRadixSwitch();
CheckTuneSwitch();
CheckPTTPin();
}
void CheckEncoder() {
byte encoderA = digitalRead(rotAPin);
byte encoderB = digitalRead(rotBPin);
if ((encoderA == HIGH) && (encoderC == LOW)) {
if (encoderB == HIGH)
// Decrease frequency
//freq = constrain(freq - radix, bandStart, bandEnd);
SWR = constrain(SWR - 0.1, 1, 9);
else
// Increase frequency
//freq = constrain(freq + radix, bandStart, bandEnd);
SWR = constrain(SWR + 0.1, 1, 9);
}
encoderC = encoderA;
// if (freq != oldfreq) {
if (SWR != oldSWR) {
UpdateDisplay();
SendFrequency();
//oldfreq = freq;
oldSWR = SWR;
}
}
void CheckRadixSwitch() {
if (digitalRead(RadixPin) == 0) {
radix = radix / 10;
if (radix < 1)
radix = 1000;
delay(200);
}
if (radix != oldradix) {
UpdateRadixDisplay();
oldradix = radix;
}
}
void CheckTuneSwitch() {
if (digitalRead(TunePin) == 0)
tune = 1; // 1=tune
if (digitalRead(TunePin) == 1)
tune = 0; // 0=no tune
if (tune != oldtune) {
lcd.setCursor(0, 0);
lcd.print(" ");
UpdateDisplay();
UpdateRadixDisplay();
SendFrequency();
oldtune = tune;
}
}
void CheckPTTPin() {
if ((digitalRead(PTTPin) == 0) || (tune == 1))
TX = 1; // tranmitting
if (digitalRead(PTTPin) == 1)
TX = 0; // receiving
if (TX != oldTX) {
SendFrequency();
oldTX = TX;
}
}
void UpdateDisplay() {
if (tune == 0) {
// Freq
lcd.setCursor(0, 0);
lcd.print(freq);
}
if (tune == 1) {
int SWRtotal = SWR * 10;
int NumberFullBars = (SWRtotal / 3) - 3; // -3 to make SWR=1.0 the first bar on the left
int remainder = SWRtotal % 3;
for (int x = 0; x <= 15; x++) {
lcd.setCursor(x, 0);
if (x < NumberFullBars)
lcd.write(byte(3));
if ((x == NumberFullBars) && (remainder == 1))
lcd.write(byte(1));
if ((x == NumberFullBars) && (remainder == 2))
lcd.write(byte(2));
if (x == (NumberFullBars + 1))
lcd.print(" ");
}
}
// Power
lcd.setCursor(0, 1);
lcd.print("PWR:");
lcd.print(FWD);
// SWR
lcd.setCursor(9, 1);
lcd.print("SWR:");
lcd.print(SWR);
}
void UpdateRadixDisplay() {
if (tune == 0) {
// radix
if (radix == 1000) {
lcd.setCursor(9, 0);
lcd.print(" ");
lcd.setCursor(9, 0);
lcd.print(radix);
lcd.setCursor(14, 0);
lcd.print("Hz");
}
if (radix == 100) {
lcd.setCursor(9, 0);
lcd.print(" ");
lcd.setCursor(10, 0);
lcd.print(radix);
lcd.setCursor(14, 0);
lcd.print("Hz");
}
if (radix == 10) {
lcd.setCursor(9, 0);
lcd.print(" ");
lcd.setCursor(11, 0);
lcd.print(radix);
lcd.setCursor(14, 0);
lcd.print("Hz");
}
if (radix == 1) {
lcd.setCursor(9, 0);
lcd.print(" ");
lcd.setCursor(12, 0);
lcd.print(radix);
lcd.setCursor(14, 0);
lcd.print("Hz");
}
}
}
void SendFrequency() {
if (tune == 0) // no tune
{
if (TX == 1) // Transmit
{
si5351.set_freq(((BFO_freq + freq) * 100ULL), SI5351_CLK2); // VFO
si5351.set_freq((BFO_freq * 100ULL), SI5351_CLK0); // BFO
} else // Receive
{
si5351.set_freq(((BFO_freq + freq) * 100ULL), SI5351_CLK0); // VFO
si5351.set_freq((BFO_freq * 100ULL), SI5351_CLK2); // BFO
}
}
if (tune == 1) // tune
{
}
}






















{kind=link}